- ホーム
- 教員と研究室
- 共同研究・科研費プロジェクト
- 動力学系・制御工学系
共同研究・科研費プロジェクト
動力学系・制御工学系
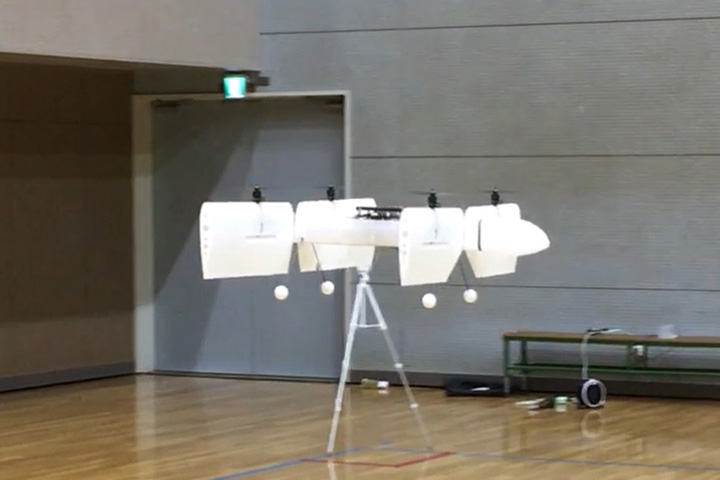
拡張モデル予測制御を用いたQTW-UAVの完全自律飛行の実現
内山・増田研究室,増田開(研究代表者)
研究プロジェクト内容紹介
ドローンを用いた配送を大手通販企業等によって検討されている。それらで用いることが想定されている通常のドローンは、垂直離着陸が可能でどんな場所からも離陸、着陸が可能な点や空中静止等の複雑な飛行を行うことができる。一方で、旅客機のような翼の備えた固定翼型航空機と比較して飛行できる距離が短く、飛行速度が遅い欠点がある。また、故障等における墜落のリスクも無視できない。そこで、固定翼型航空機とドローンの両方の特性を有するクワッドティルトウイング型無人機(QTW-UAV)を開発する。本研究では、QTW-UAVの実用化を目指し、物資配送の完全自立飛行の実証を目的とする。